
Nykyaikaisissa ruiskutus- ja dieselmoottoreissa käytetään ohjausjärjestelmiä, joissa on monia antureita, jotka valvovat kymmeniä parametreja.Antureiden joukossa erityinen paikka on vaiheanturilla tai nokka-akselin asentoanturilla.Lue artikkelista tämän anturin toiminnoista, suunnittelusta ja toiminnasta.
Mikä on vaiheanturi
Vaiheanturi (DF) tai nokka-akselin asentoanturi (DPRV) on ruiskutusbensiini- ja dieselmoottoreiden ohjausjärjestelmän anturi, joka valvoo kaasunjakelumekanismin asentoa.DF:n avulla moottorisyklin alku määräytyy sen ensimmäisen sylinterin mukaan (kun TDC saavutetaan) ja toteutetaan vaiheittainen ruiskutusjärjestelmä.Tämä anturi on kytketty toiminnallisesti kampiakselin asentoanturiin (DPKV) - elektroninen moottorinhallintajärjestelmä käyttää molempien antureiden lukemia ja tuottaa tämän perusteella pulsseja polttoaineen ruiskutukseen ja sytytykseen jokaiseen sylinteriin.
DF:iä käytetään vain bensiinimoottoreissa, joissa on hajautettu vaiheruiskutus, ja tietyntyyppisissä dieselmoottoreissa.Ja juuri anturin ansiosta vaiheittaisen ruiskutuksen periaate toteutetaan helpoimmin, toisin sanoen polttoaineen ruiskutus ja sytytys jokaiselle sylinterille moottorin käyttötavasta riippuen.Kaasutinmoottoreissa DF:tä ei tarvita, koska polttoaine-ilmaseos syötetään sylintereihin yhteisen jakoputken kautta ja sytytystä ohjataan jakajalla tai kampiakselin asentotunnistimella.
DF:ää käytetään myös moottoreissa, joissa on säädettävä venttiilin ajoitusjärjestelmä.Tällöin imu- ja pakoventtiilejä ohjaaville nokka-akseleille sekä monimutkaisemmille ohjausjärjestelmille ja niiden toimintaalgoritmeille käytetään erillisiä antureita.
Vaiheanturien suunnittelu
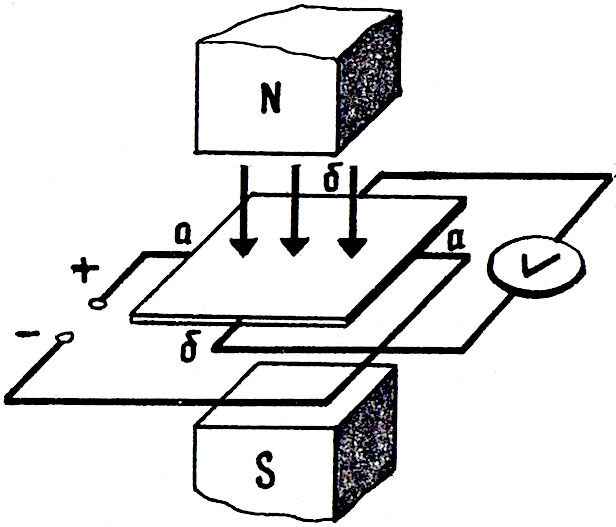
Tällä hetkellä käytetään Hall-ilmiöön perustuvaa DF:tä - potentiaalieron esiintymistä puolijohdekiekossa, jonka läpi tasavirta kulkee, kun se asetetaan magneettikenttään.Hall-efektianturit toteutetaan melko yksinkertaisesti.Se perustuu neliön tai suorakaiteen muotoiseen puolijohdekiekkoon, jonka neljälle sivulle on kytketty koskettimet - kaksi tuloa tasavirran syöttämiseen ja kaksi lähtöä signaalin poistamiseen.Mukavuuden vuoksi tämä malli on tehty sirun muodossa, joka asennetaan anturin koteloon magneetin ja muiden osien kanssa.
Vaiheantureita on kahta suunnittelutyyppiä:
-Uurrettu;
- Pää (tanko).

Rako-anturi

Lopputunnistin
Urattu vaiheanturi on U-muotoinen, sen osassa on nokka-akselin vertailupiste (merkki).Anturin runko on jaettu kahteen puolikkaaseen, toisessa on kestomagneetti, toisessa on herkkä elementti, molemmissa osissa on erikoismuotoiset magneettiytimet, jotka muuttavat magneettikenttää vertailuarvon kulku.
Päätyanturi on sylinterimäinen, nokka-akselin vertailupiste kulkee sen pään edestä.Tässä anturissa anturielementti sijaitsee päässä, sen yläpuolella on kestomagneetti ja magneettiytimet.
Tässä on huomioitava, että nokka-akselin asentoanturi on kiinteä, eli se yhdistää yllä kuvatun signaalintunnistuselementin ja toissijaisen signaalinmuuntimen, joka vahvistaa signaalin ja muuntaa sen muotoon, joka on kätevä elektronisen ohjausjärjestelmän käsittelyä varten.Muunnin rakennetaan yleensä suoraan anturiin, mikä yksinkertaistaa huomattavasti koko järjestelmän asennusta ja konfigurointia.
Vaiheanturin toimintaperiaate
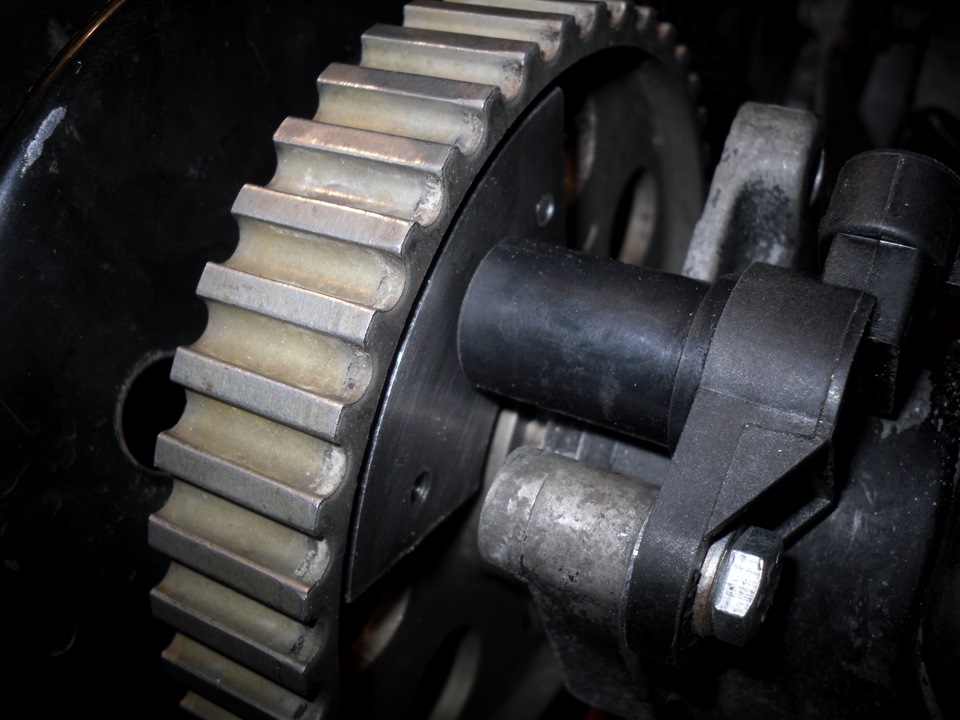
Vaiheanturi on paritettu nokka-akselille asennettuun päälevyyn.Tällä levyllä on jonkinlainen tai toisella mallilla oleva vertailupiste, joka kulkee anturin edestä tai sen raosta moottorin käytön aikana.Anturin edestä ohittaessaan referenssipiste sulkee siitä ulos tulevat magneettiviivat, mikä johtaa herkän elementin ylittävän magneettikentän muutokseen.Tämän seurauksena Hall-anturissa syntyy sähköinen impulssi, jota muuntaja vahvistaa ja muuttaa, ja se syötetään elektroniseen moottorin ohjausyksikköön.
Uri- ja päätyantureissa käytetään erityyppisiä master-levyjä.Yhdistettynä ura-antureiden kanssa ilmavälillä varustettu levy toimii - ohjauspulssi muodostuu tämän raon ohittaessa.Yhdistettynä pääteanturiin, hampailla tai lyhyillä mittareilla varustettu kiekko toimii - ohjausimpulssi muodostuu, kun benchmark ohittaa.
Vaiheanturi on paritettu nokka-akselille asennettuun päälevyyn.Tällä levyllä on jonkinlainen tai toisella mallilla oleva vertailupiste, joka kulkee anturin edestä tai sen raosta moottorin käytön aikana.Anturin edestä ohittaessaan referenssipiste sulkee siitä ulos tulevat magneettiviivat, mikä johtaa herkän elementin ylittävän magneettikentän muutokseen.Tämän seurauksena Hall-anturissa syntyy sähköinen impulssi, jota muuntaja vahvistaa ja muuttaa, ja se syötetään elektroniseen moottorin ohjausyksikköön.
Uri- ja päätyantureissa käytetään erityyppisiä master-levyjä.Yhdistettynä ura-antureiden kanssa ilmavälillä varustettu levy toimii - ohjauspulssi muodostuu tämän raon ohittaessa.Yhdistettynä pääteanturiin, hampailla tai lyhyillä mittareilla varustettu kiekko toimii - ohjausimpulssi muodostuu, kun benchmark ohittaa.
Postitusaika: 24.8.2023